


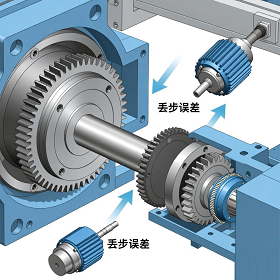
避免步進減速機在細分步距時的丟步誤差需要從多個角度入手,包括設備選擇、控制策略、反饋機制、維護保養(yǎng)及程序優(yōu)化等。在步進減速機細分步距時,可從電氣、機械、監(jiān)測三方面避免丟步誤差:
一、優(yōu)化電氣控制
1.穩(wěn)定供電:確保電源電壓穩(wěn)定且適配,像3D打印機用穩(wěn)壓開關電源,將波動控在±5%內(nèi)。
2.適配驅(qū)動與參數(shù):選合適驅(qū)動器,依電機和負載調(diào)細分參數(shù),如雕刻機用高細分驅(qū)動,設16或32細分倍數(shù),合理設電流限制。
3.優(yōu)化脈沖傳輸:用雙絞線傳輸脈沖信號,做好屏蔽,遠離強電,防信號失真。
二、合理機械設計與安裝
1.精確選型:選高精度步進減速機與聯(lián)軸器,如電子制造設備用行星減速機,回差控在3弧分以內(nèi),配梅花聯(lián)軸器。
2.保證安裝精度:按要求裝電機與減速機,用百分表校準,使同軸度偏差小于0.05mm。
3.控制負載慣量:使負載慣量不超電機轉(zhuǎn)子慣量3倍,大負載設備可增傳動比或多電機驅(qū)動。
三、加強運行監(jiān)測與反饋
1.編碼器反饋:在電機軸端裝編碼器,實時監(jiān)測位置,與脈沖信號對比,偏差時驅(qū)動器及時調(diào)整。
2.實時監(jiān)測:智能系統(tǒng)實時監(jiān)測電機電流、溫度等,異常時報警并處理。
3.算法補償:用PID或模糊控制算法,調(diào)整控制參數(shù)補償丟步誤差。
